Task 2: Rearrange Dice¶

Task: Rearrange Dice
The goal of this task is to arrange multiple dice into a given pattern.
The pattern is given as a list of N target positions where N is the number of dice:
goal = [
(0.10, 0.04, 0.01),
(0.04, -0.08, 0.01),
(0.0, 0.15, 0.01),
...
]
Since the single dice are indistinguishable the target positions are not linked to a specific die, there should just be one die at each position in the end.
The duration of a run is 120000 steps (~2 minutes). This value is also given
by EPISODE_LENGTH.
The cost of each step is computed using the camera images. Based on the
colour, it is determined how many “die pixels” are outside of the target
regions (see evaluate_state()).
-
trifinger_simulation.tasks.rearrange_dice.EPISODE_LENGTH= 120000¶ Duration of the episode in time steps (corresponds to ~2 minutes).
-
trifinger_simulation.tasks.rearrange_dice.NUM_DICE= 25¶ Number of dice in the arena
-
trifinger_simulation.tasks.rearrange_dice.sample_goal()[source]¶ Sample a random list of die goal positions.
-
trifinger_simulation.tasks.rearrange_dice.evaluate_state(goal_masks, actual_masks)[source]¶ Compute cost of a given state. Less is better.
The cost is computed as the number of “die pixels” in the actual masks that do not overlap with the goal mask:
cost = count(actual_masks AND (NOT goal_masks))
- Parameters
goal_masks (Sequence[numpy.ndarray]) – Masks of the desired die positions in the camera images, one mask per camera. Use
generate_goal_mask()to generate the goal mask for a given goal.actual_masks (Sequence[numpy.ndarray]) – Masks of the actual die positions in the camera images, one mask per camera using the same order as
goal_masks.
- Returns
The cost of the given state.
- Return type
float
-
trifinger_simulation.tasks.rearrange_dice.validate_goal(goal)[source]¶ Verify that the goal has the proper shape and all positions are valid.
- Raises
OutOfArenaError – If a die position is outside the valid range.
InvalidGoalError – If the goal does not have the expected shape.
-
trifinger_simulation.tasks.rearrange_dice.json_goal_from_config(filename)[source]¶ Load or sample a goal based on the given goal config file.
- Parameters
filename (str) – Path to the goal config JSON file. If it contains an entry “goal”, its value is used as goal. Otherwise a random goal is sampled.
- Returns
The goal as JSON-encoded string.
- Return type
str
-
trifinger_simulation.tasks.rearrange_dice.seed()[source]¶ Set random seed for this module.
- Parameters
seed (int) –
-
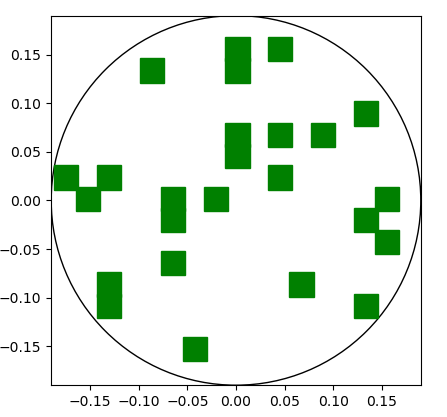
trifinger_simulation.tasks.rearrange_dice.visualize_2d(target_positions)[source]¶ Visualise the target positions in 2d.
Shows a top-down view of the arena with the goal positions marked by squares.
- Parameters
target_positions (Sequence[Sequence[float]]) – The goal that is visualised.
Example on how the visualisation look like:
-
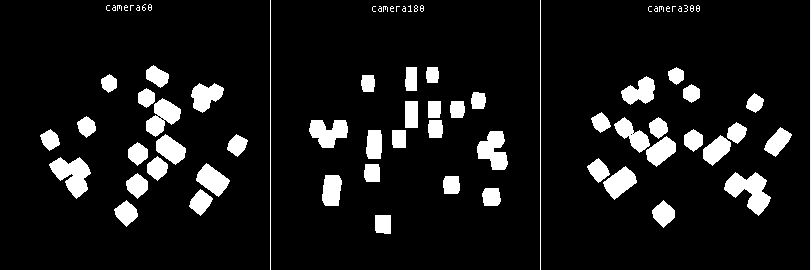
trifinger_simulation.tasks.rearrange_dice.generate_goal_mask(camera_parameters, goal)[source]¶ Generate goal masks that can be used with
evaluate_state().A goal mask is a single-channel image where the areas at which dice are supposed to be placed are white and everything else is black. So it corresponds more or less to a segmentation mask where all dice are at the goal positions.
For rendering the mask,
TARGET_WIDTHis used for the die width to add some tolerance.- Parameters
camera_parameters (Sequence[trifinger_simulation.camera.CameraParameters]) – List of camera parameters, one per camera.
goal (Sequence[Sequence[float]]) – The goal die positions.
- Returns
List of masks. The number and order of masks corresponds to the input
camera_parameters.- Return type
List[numpy.ndarray]
Example on how the generated goal masks look like: