Stage 1: Move Cube with the Real Robot¶
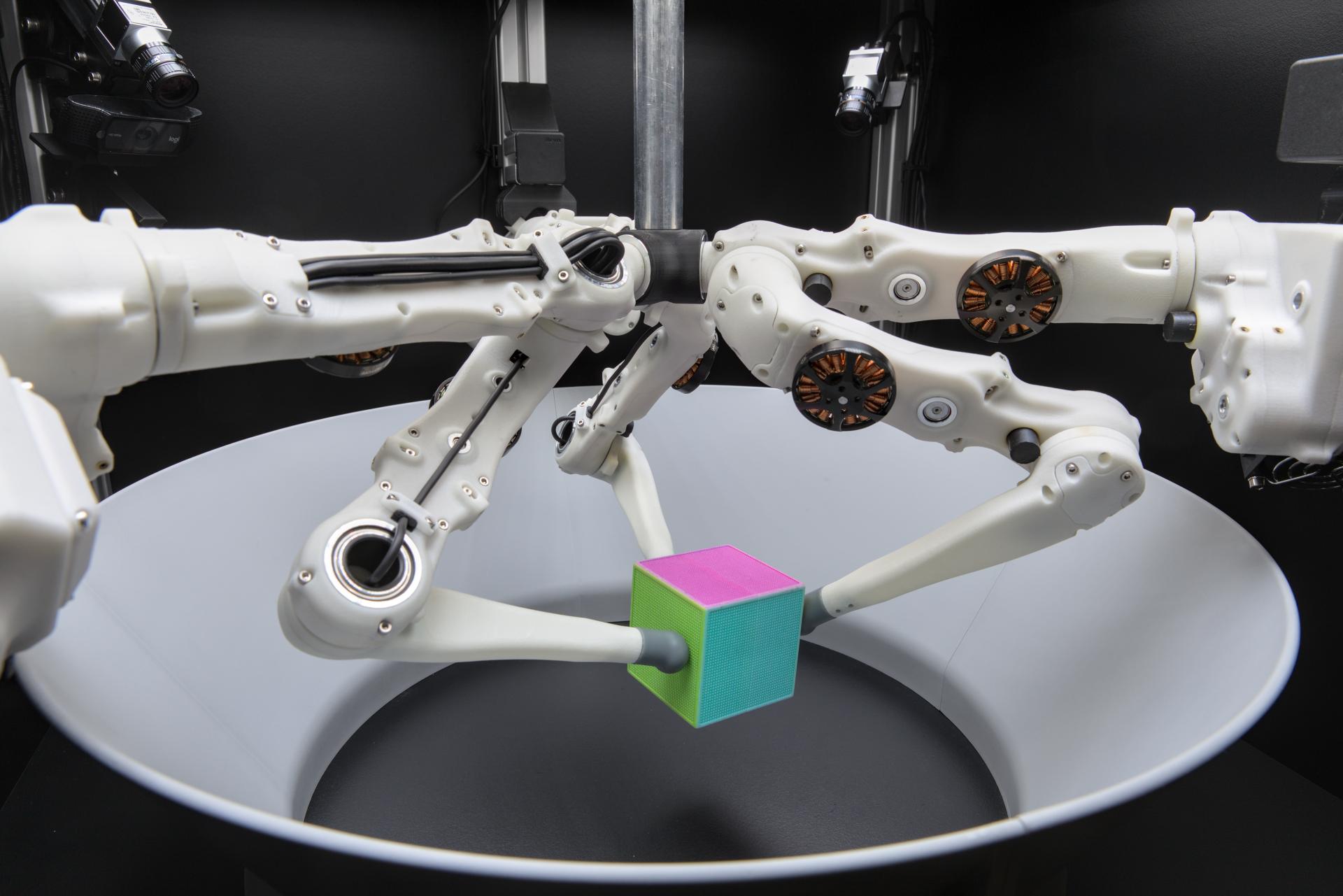
In stage 1 the same task as in the pre-stage has to be solved (see Task 1: Move Cube on Trajectory) but now on the real robot.
About the Cube¶
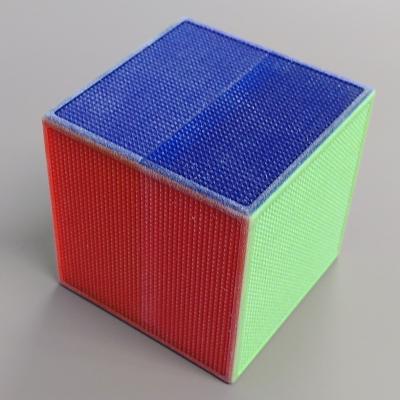
The surface of the cubes has some structure to make grasping them easier. Each side has a different colour to help the camera-based object tracking.
Width: 6.5 cm
Weight: 94 g
Format of goal.json¶
By default a random trajectory will be sampled when you execute a job on the
robot. If you want to test specific cases, you can specify a fixed
trajectory by adding a file goal.json to your repository (see
Goal Sampling Settings). For the task of this stage, the format of that
file has to be as follows:
{ "goal": [ [0, [0.070, -0.025, 0.043]], [30000, [-0.090, 0.003, 0.084]], [40000, [0.090, 0.030, 0.010]], ... ] }
Each element of the outer list corresponds to one trajectory step. For each step a tuple with a time index and an (x, y, z)-position is given.
The time index specifies when the corresponding trajectory step becomes active. It will stay active until the time index of the next step is reached. The first step in the trajectory always needs to start at time index zero. The last step will remain active until the end of the episode.